Dieser Beitrag wurde am 09.11.2022 aktualisiert.
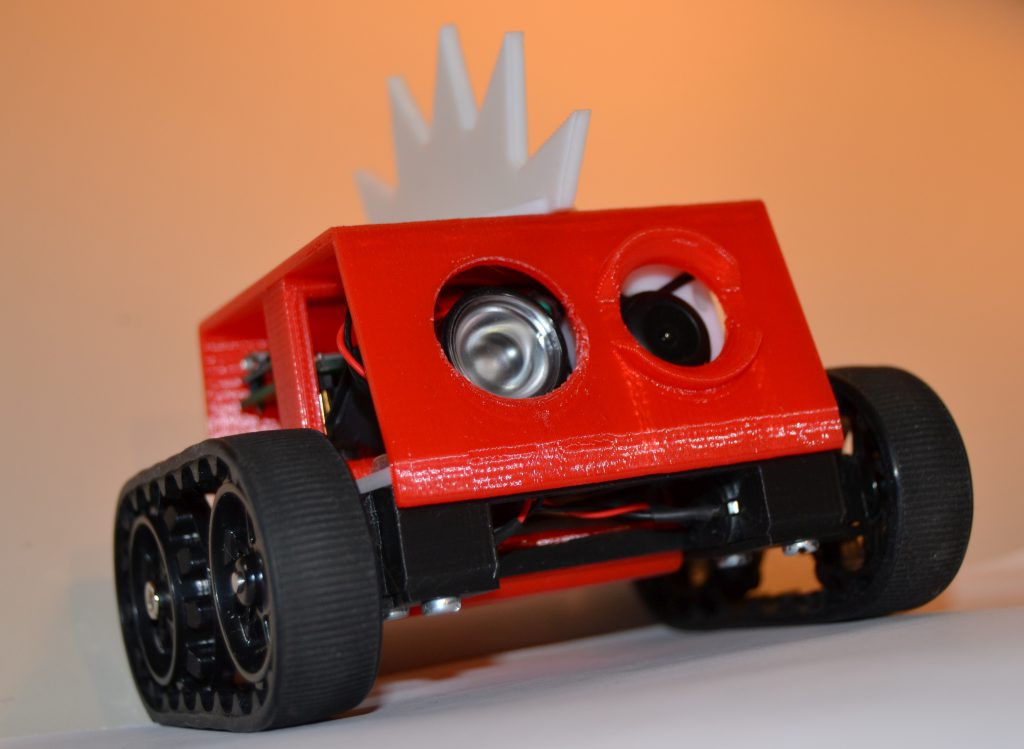
Der LITERO ist ein kleiner fahrbarer Roboter mit Kamera und Infrarotscheinwerfer, der via WiFi mit dem Handy oder Tablet steuerbar ist. Wir haben den kleinen Burschen nachgebaut und Schaltpläne ergänzt, die der Autor noch nicht zur Verfügung gestellt hatte. Der verwendete Raspberry Pi Zero wird mit dem lokalen W-LAN verbunden und stellt eine Website mit Livestream und Joystik zur Verfügung, die einfach mit dem Handy aufgerufen wird.
Los geht´s durch die Wohnung und unter die Schränke. Vorsicht, dass keiner versehentlich darauftritt. Geladen wird das kleine Kettenfahrzeug über ein Micro-USB Kabel. Ist der Akku leer, fährt das Python Script den Raspberry Pi herunter.
Zunächst findest du alles wichtige zu dem Projekt auf dieser Seite:
Auf Thiniverse findet man auch alles, was für den Roboter gedruckt werden muss:
https://www.thingiverse.com/thing:2896668
Die Hauptplatine
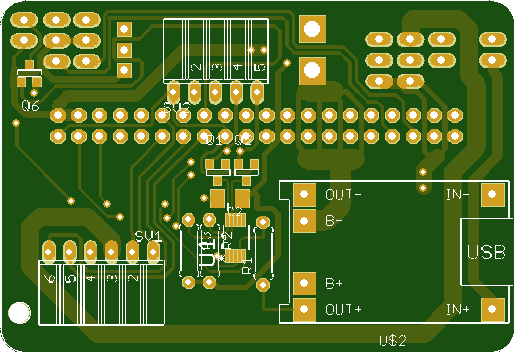
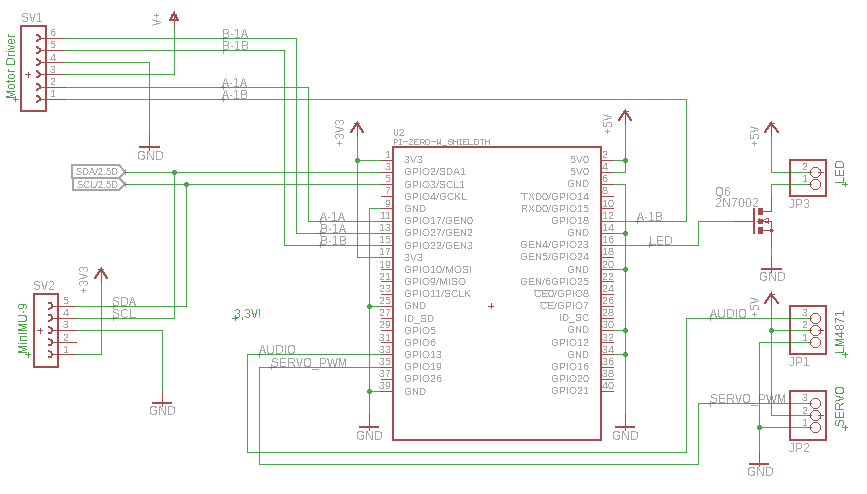
Wer den Original LiTeRo nachbaut wird feststellen, dass über die Verschaltung der Elektronik nicht viel gesagt wird. Wir haben zwischen den Zeilen gelesen und die folgende Hauptplatine entwickelt. Wie zu vermuten ist, war Version A nicht ganz perfekt. Die aktuellen Schaltpläne möchte ich aber nicht vorenthalten. Auf Anfrage geben wir aber gerne noch aktualisierte Platinen in Auftrag, wenn alle Details geklärt sind. Unklar ist nämlich: Wie trennt man den Akku vom Boardnet, ohne das ganze Teil zu demontieren? Ein weiterer Punkt ist die Ladeelektronik. Diese ist eigentlich für Li-Ionen Akkus ausgelegt und trennt den Li-Po nicht rechtzeitig vom Netz.
Bug Report
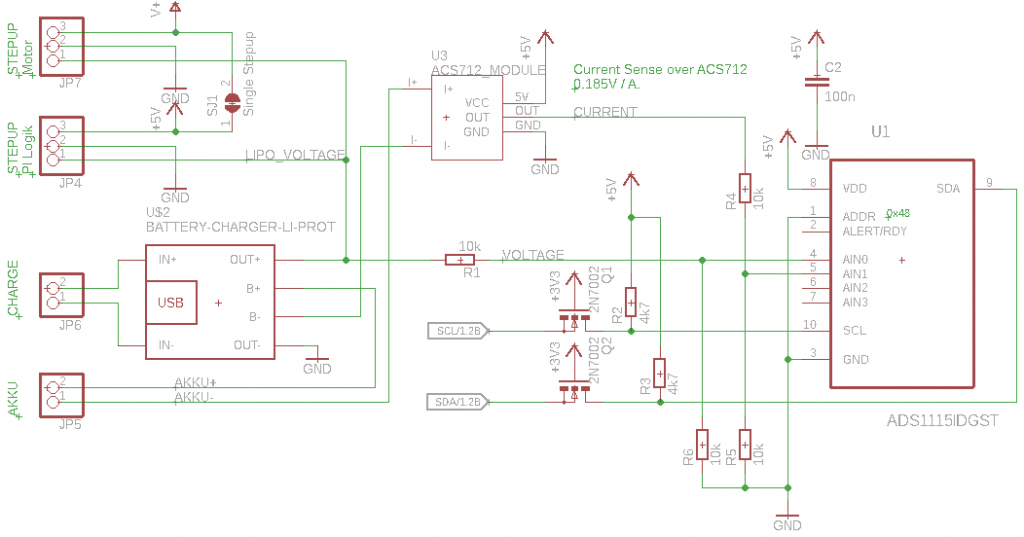
- Package vom ACS712 passt nicht ganz, am besten gleich nur den IC integrieren. Beachte: Der ACS712 wird nicht für neue Designs empfohlen, also gleich den ACS723LLCTR-10AB (200mV/A)
- ADC SCL und SDA sind vertauscht
- Gyro und Driver kollidieren, ggf. nur einen Magnetfeldsensor aus Preisgründen integrieren.
- Schraubterminals des Drivers kollidieren mit Gehäuse
- Leiterplattendruck sollte die Polarität der Anschlüsse zeigen
- Ein Ausschalter wäre nicht schlecht oder der Anschlussstecker für den LIPO muss besser zugänglich sein.
- Boot bzw. Start PI Button zwischen SCL auf GND.
- 2 Ferrite MMZ2012Y152B an den ADC und 2×1µF Puferkondensatoren davor und dahinter
- Alle ADC Kanäle mit Spannungsteilern 0.5 (2x10k)
- 5V ACS 712 Versorgungsspannung mit Spannungsteiler 0.25 (3:1) an AN3 anschließen.
- Sperrige Netzteile auf der Hauptplatine integrieren.
- Audioverstärker integrieren.
- Polarität des Stromsensors muss gegenüber dem Original noch gedreht werden
Ein Kommentar
Die Kommentare sind geschlossen.