Dieser Beitrag wurde am 15.02.2023 aktualisiert.
Inhaltsverzeichnis
Was ist ein Industrieroboter?
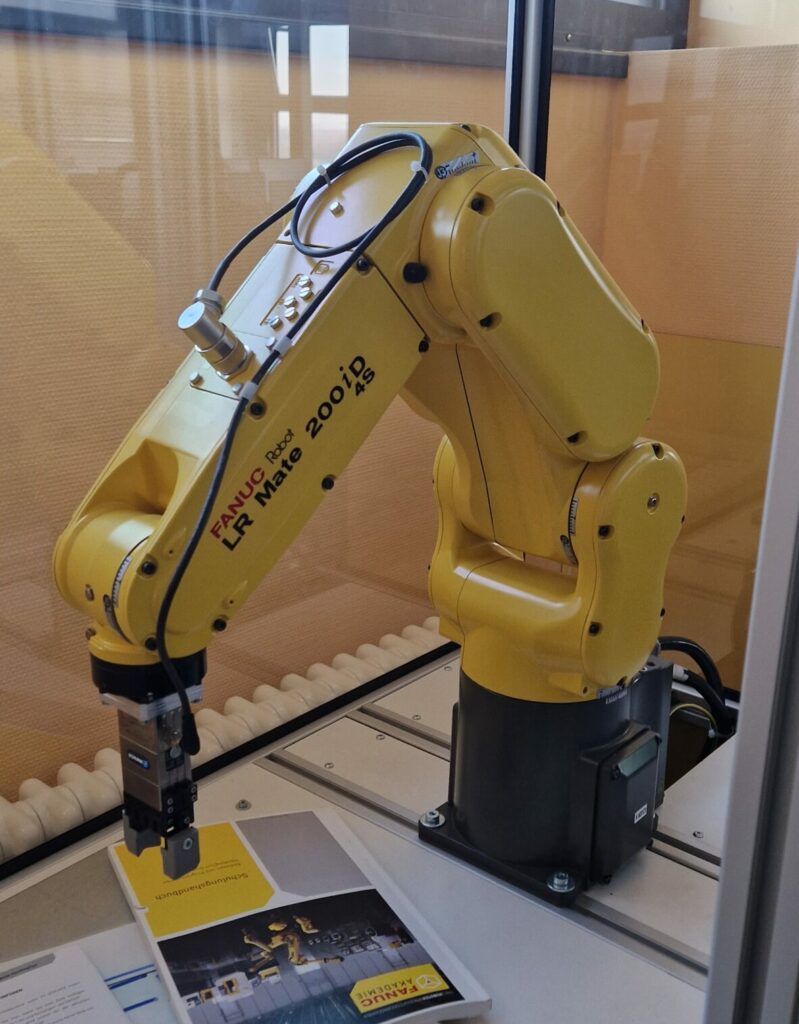
Ein Industrieroboter ist ein sehr vielseitiges Gerät zum Abarbeiten bestimmter, sich wiederholender Aufgaben im industriellen Umfeld. Am häufigsten werden sie verwendet, um sehr kleine bis sehr große Teile von A nach B zu bewegen. Der große Vorteil an ihnen ist die Vielseitigkeit und die große Bewegungsfreiheit, wodurch sie heutzutage in fast jedem industriellen Betrieb zu finden sind. Genau aus diesem Grund steht ein solcher Roboter (in kleinem Format) in der Fachschule für Technik in Mühlhausen.
But why?
Der Fanuc-Roboter hat die Möglichkeit, Ein- und Ausgänge mit 24V Pegel anbinden zu können.
Dadurch ergeben sich vielerlei Möglichkeiten, den Funktionsumfang der Übungsprogramme zu erweitern und den Roboter coolere Dinge machen zu lassen.
Die Idee
Die Idee war, die jeweils 8 Eingänge und 8 Ausgänge möglichst universell nutzen zu können. Also war schon einmal klar, dass es viele verschiedene Steckertypen werden müssen. Die verbreitetsten Steckertypen im Industrie- und Schulumfeld sind Initiatorenstecker und Laborsteckverbinder.
Für die Verbindung der Stecker mit dem Kabel des Roboters habe ich mich dafür entschieden, eine Platine zu entwerfen. Der Vorteil: Kein Kabelsalat und keine lose herumfliegenden Bauteile.
Das Gehäuse wird selbstverständlich im 3D-Druck Verfahren passgenau hergestellt.
Die Platine
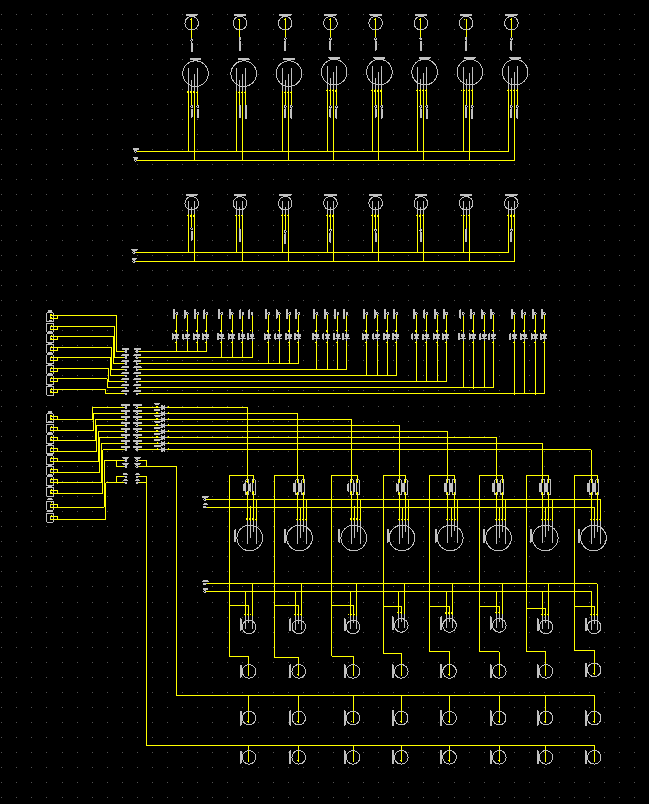
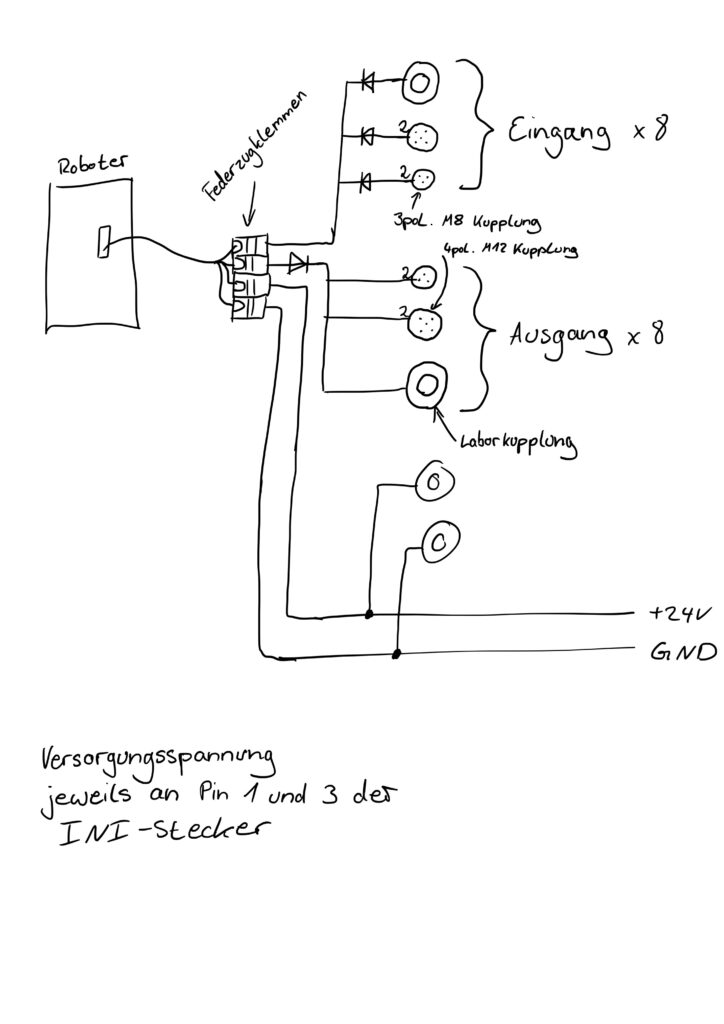
Ja gut, den Schaltplan kann man jetzt nicht wirklich gut erkennen, also hier nochmal ein schematischer Schaltplan:
Wunderbar.
Wie man eventuell erkennt, kommen 3- und 5-polige Kupplungen sowie Laborbuchsen zum Einsatz.
So kann man alle gängigen Sensoren an die Initiatoren-Stecker anschließen und andere Dinge an die Laborbuchsen. So weit, so gut.
Die Dioden dienen dem Schutz der Sensoren und zur Steuerung des Roboters. Dadurch kann man nichts kaputt machen, wenn man etwas falsch anschließt.
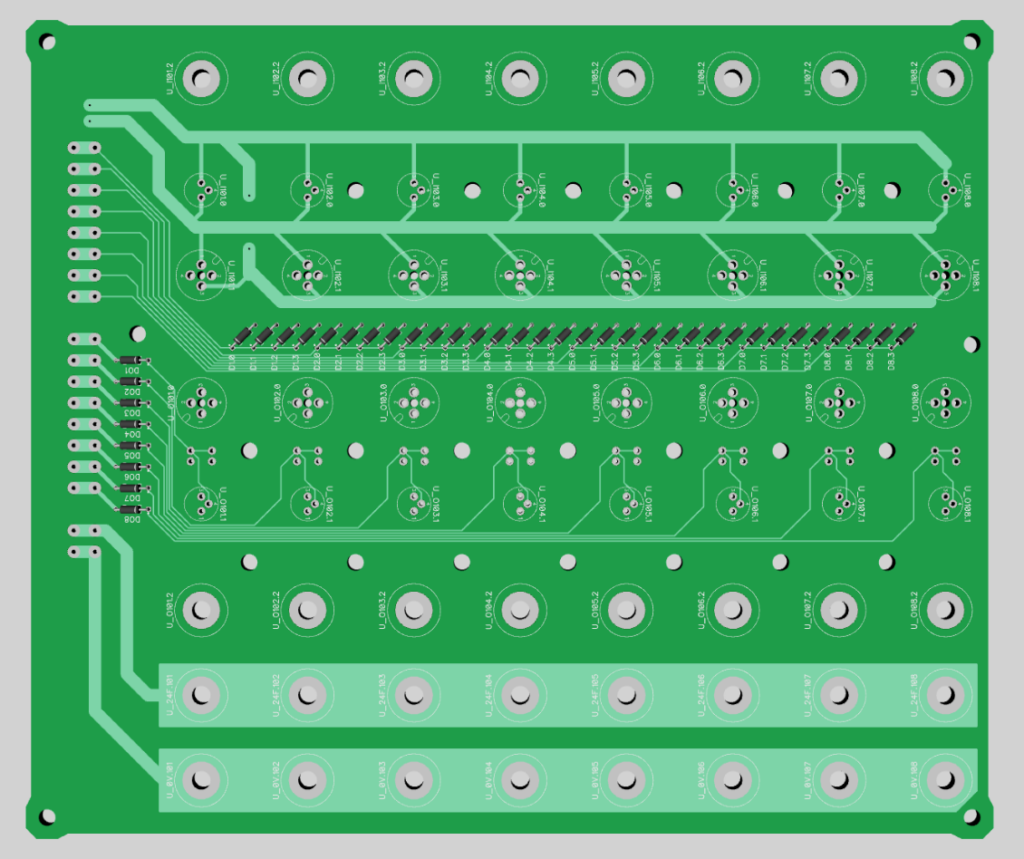
Die Platine habe ich mit DipTrace, dem EDA-Programm meiner Wahl erstellt, und die sogenannten Gerber-Dateien nach China zu meinem Lieblingshersteller geschickt, der mit JLC anfängt und mit PCB aufhört.
Das Witzige dabei war, dass ich einen Fehler gemacht habe, den ich erst bemerkt hatte, als die Platinen schon bei mir Zuhause waren. Also direkt korrigiert und wieder neu bestellt… shit happens.
Das Gehäuse
Das Gehäuse muss 3D gedruckt werden, das steht fest.
Aber: Ach du meine Güte, war das ein Krampf. Das ist das beste Beispiel dafür, dass man nichts mal schnell so nebenbei machen sollte. Es ging von Spaghettiball über Nozzleverstopfung direkt zu fertig gedruckt, aber passt nicht. Und dabei mussten locker 2kg Filament dran glauben. Nicht nur schlecht für die Umwelt, sondern auch für die Motivation.
Beim drölften Versuch hat es dann geklappt und es hat auch ziemlich gut gepasst:
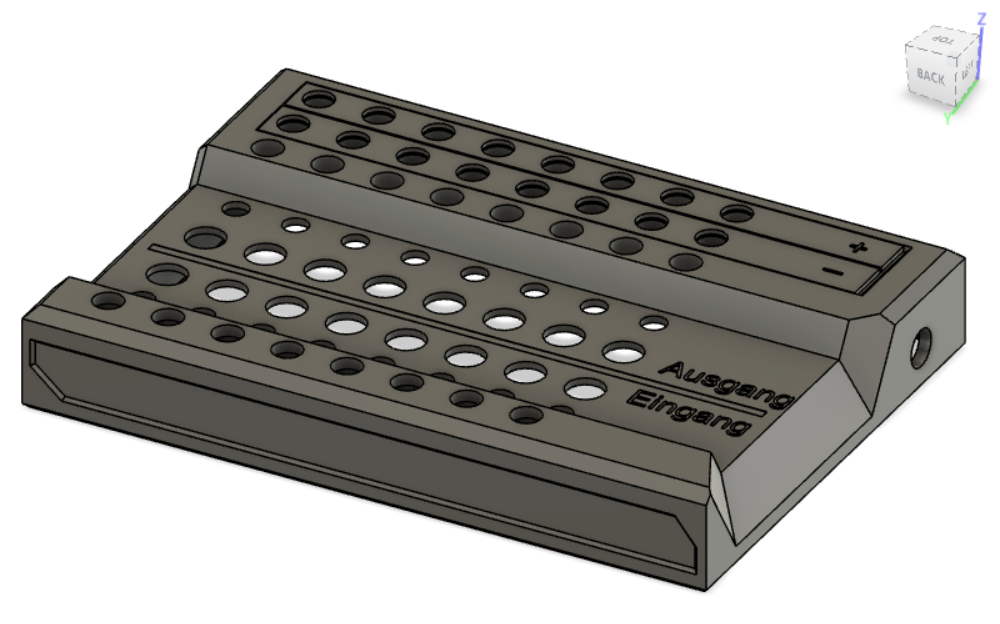
Das Ganze habe ich in Autodesk Fusion360 konstruiert, mit Cura 5.x gesliced und mit meinem Creality CR10S-PRO gedruckt.
Das fertige Ding
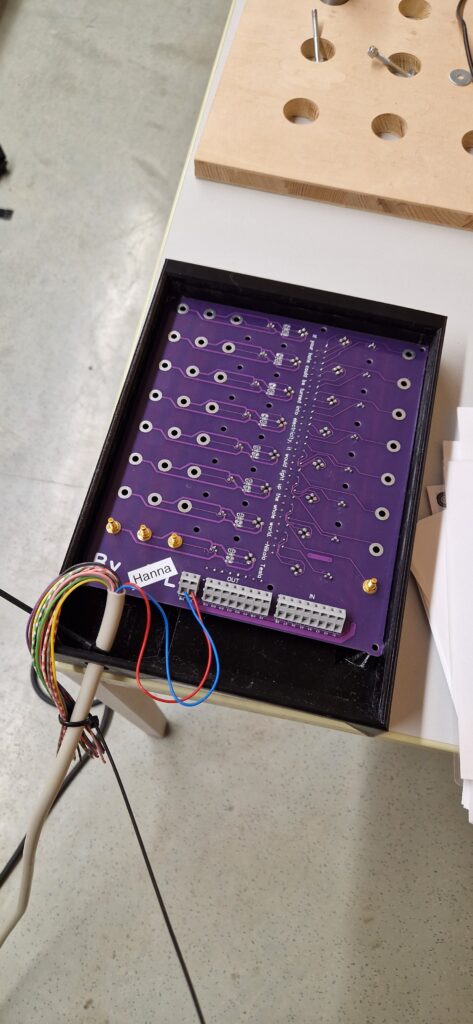
Dieses Bild stammt vom ersten Test. Glücklicherweise hat alles funktioniert.

Und hier ist es komplett zusammengebaut.
Für die Anwender
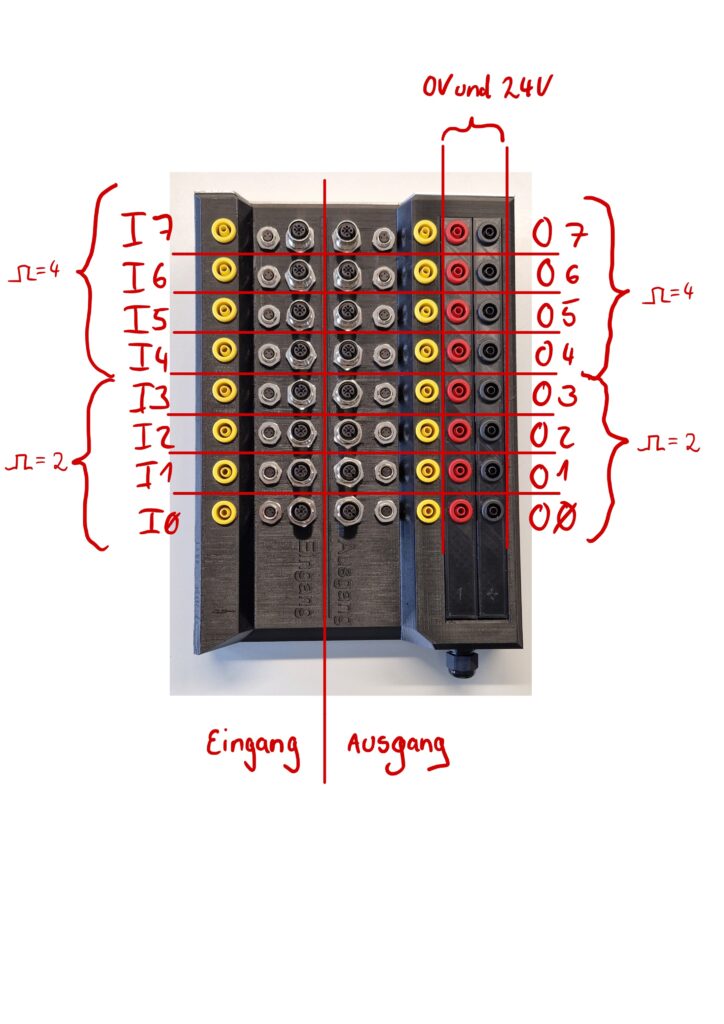
Bei der IO-Box gibt es nicht viel zu beachten.
Wichtig:
– die Ausgänge möglichst nicht kurzschließen
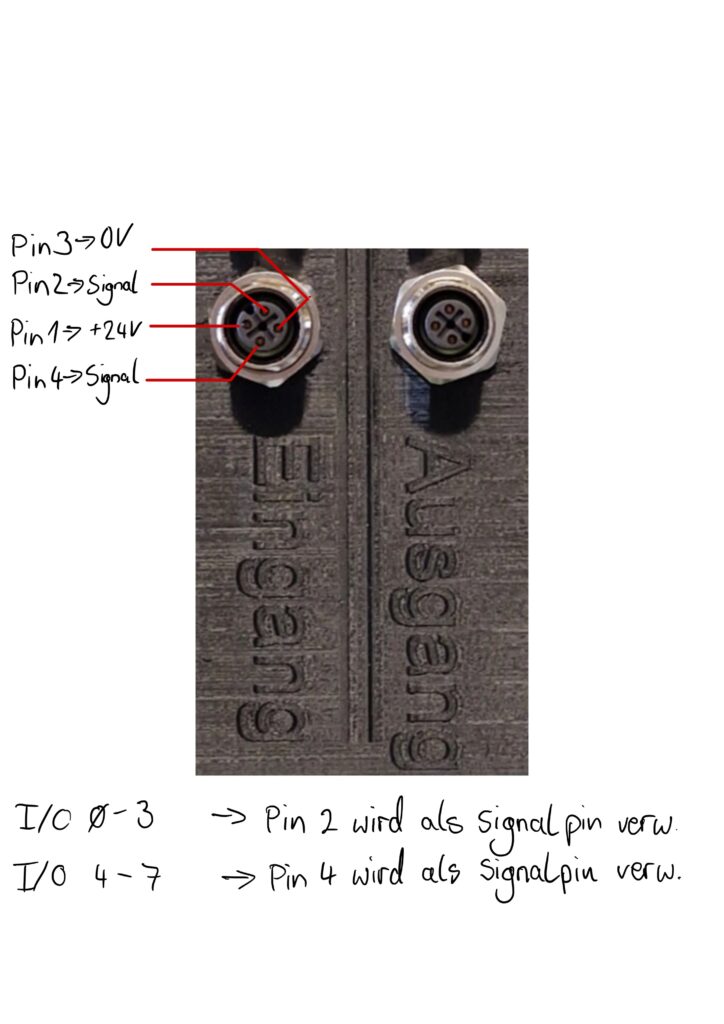
– die Pinbelegung der 4-poligen M12 Stecker ist zwischen I/O 0-3 und 4-7 unterschiedlich (mehr dazu auf dem Bild)
– die Ein- und Ausgänge sind *theoretisch* bis 2A belastbar